 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelective Latent Thinking: Adaptive Compression of LLM Reasoning Chains
May 25, 2026Explicit chain-of-thought (CoT) reasoning substantially improves the reasoning ability of large language models (LLMs), but incurs high inference cost due to lengthy autoregressive traces. Existing latent reasoning methods offer a promising alternative, yet they often treat reasoning as uniformly compressible, causing precision-critical intermediate steps to be overly compressed and thereby degrading reasoning accuracy. In this work, we propose Selective Latent Thinking (SLT), a framework that selectively compresses redundant reasoning spans into latent representations while preserving precision-critical spans as explicit CoT within the same reasoning trajectory. Specifically, SLT first uses a lightweight decoder to anticipate a short upcoming reasoning span, and then applies confidence-based gating to determine the longest span that can be reliably compressed. The accepted span is encoded into a compact latent representation to improve reasoning efficiency, while uncertain or precision-critical reasoning remains in explicit CoT form to preserve accuracy. To learn this selective compression policy, SLT adopts a three-stage training strategy that combines span-level latent compression, reliability-aware future reasoning prediction, and trajectory-level reinforcement learning to optimize the trade-off between answer correctness and reasoning cost. Extensive experiments across four mathematical reasoning benchmarks demonstrate that SLT achieves 22.7\% higher accuracy than latent reasoning baselines at comparable compression ratios, while reducing reasoning chain length by 58.4\% with only 2.8\% accuracy degradation compared to explicit CoT,Our code can be found in https://github.com/hunshi34/SLT.
Seg-Agent: Test-Time Multimodal Reasoning for Training-Free Language-Guided Segmentation
May 13, 2026Language-guided segmentation transcends the scope limitations of traditional semantic segmentation, enabling models to segment arbitrary target regions based on natural language instructions. Existing approaches typically adopt a two-stage framework: employing Multimodal Large Language Models (MLLMs) to interpret instructions and generate visual prompts, followed by foundational segmentation models (e.g., SAM) to produce masks. However, due to the limited spatial grounding capabilities of off-the-shelf MLLMs, these methods often rely on extensive training on large-scale datasets to achieve satisfactory accuracy. While recent advances have introduced reasoning mechanisms to improve performance, they predominantly operate within the textual domain, performing chain-of-thought reasoning solely based on abstract text representations without direct visual feedback. In this paper, we propose Seg-Agent, a completely training-free framework that pioneers Explicit Multimodal Chain-of-Reasoning. Unlike prior text-only reasoning, our approach constructs an interactive visual reasoning loop comprising three stages: generation, selection, and refinement. Specifically, we leverage Set-of-Mark (SoM) visual prompting to render candidate regions directly onto the image, allowing the MLLM to ``see'' and iteratively reason about spatial relationships in the visual domain rather than just the textual one. This explicit multimodal interaction enables Seg-Agent to achieve performance comparable to state-of-the-art training-based methods without any parameter updates. Furthermore, to comprehensively evaluate generalization across diverse scenarios, we introduce Various-LangSeg, a novel benchmark covering explicit semantic, generic object, and reasoning-guided segmentation tasks. Extensive experiments demonstrate the effectiveness and robustness of our method.
Modality Gap-Driven Subspace Alignment Training Paradigm For Multimodal Large Language Models
Feb 02, 2026Despite the success of multimodal contrastive learning in aligning visual and linguistic representations, a persistent geometric anomaly, the Modality Gap, remains: embeddings of distinct modalities expressing identical semantics occupy systematically offset regions. Prior approaches to bridge this gap are largely limited by oversimplified isotropic assumptions, hindering their application in large-scale scenarios. In this paper, we address these limitations by precisely characterizing the geometric shape of the modality gap and leveraging it for efficient model scaling. First, we propose the Fixed-frame Modality Gap Theory, which decomposes the modality gap within a frozen reference frame into stable biases and anisotropic residuals. Guided by this precise modeling, we introduce ReAlign, a training-free modality alignment strategy. Utilizing statistics from massive unpaired data, ReAlign aligns text representation into the image representation distribution via a three-step process comprising Anchor, Trace, and Centroid Alignment, thereby explicitly rectifying geometric misalignment. Building on ReAlign, we propose ReVision, a scalable training paradigm for Multimodal Large Language Models (MLLMs). ReVision integrates ReAlign into the pretraining stage, enabling the model to learn the distribution of visual representations from unpaired text before visual instruction tuning, without the need for large-scale, high-quality image-text pairs. Our framework demonstrates that statistically aligned unpaired data can effectively substitute for expensive image-text pairs, offering a robust path for the efficient scaling of MLLMs.
Identifying and Correcting Label Noise for Robust GNNs via Influence Contradiction
Jan 24, 2026Graph Neural Networks (GNNs) have shown remarkable capabilities in learning from graph-structured data with various applications such as social analysis and bioinformatics. However, the presence of label noise in real scenarios poses a significant challenge in learning robust GNNs, and their effectiveness can be severely impacted when dealing with noisy labels on graphs, often stemming from annotation errors or inconsistencies. To address this, in this paper we propose a novel approach called ICGNN that harnesses the structure information of the graph to effectively alleviate the challenges posed by noisy labels. Specifically, we first design a novel noise indicator that measures the influence contradiction score (ICS) based on the graph diffusion matrix to quantify the credibility of nodes with clean labels, such that nodes with higher ICS values are more likely to be detected as having noisy labels. Then we leverage the Gaussian mixture model to precisely detect whether the label of a node is noisy or not. Additionally, we develop a soft strategy to combine the predictions from neighboring nodes on the graph to correct the detected noisy labels. At last, pseudo-labeling for abundant unlabeled nodes is incorporated to provide auxiliary supervision signals and guide the model optimization. Experiments on benchmark datasets show the superiority of our proposed approach.
GROVER: Graph-guided Representation of Omics and Vision with Expert Regulation for Adaptive Spatial Multi-omics Fusion
Nov 13, 2025Effectively modeling multimodal spatial omics data is critical for understanding tissue complexity and underlying biological mechanisms. While spatial transcriptomics, proteomics, and epigenomics capture molecular features, they lack pathological morphological context. Integrating these omics with histopathological images is therefore essential for comprehensive disease tissue analysis. However, substantial heterogeneity across omics, imaging, and spatial modalities poses significant challenges. Naive fusion of semantically distinct sources often leads to ambiguous representations. Additionally, the resolution mismatch between high-resolution histology images and lower-resolution sequencing spots complicates spatial alignment. Biological perturbations during sample preparation further distort modality-specific signals, hindering accurate integration. To address these challenges, we propose Graph-guided Representation of Omics and Vision with Expert Regulation for Adaptive Spatial Multi-omics Fusion (GROVER), a novel framework for adaptive integration of spatial multi-omics data. GROVER leverages a Graph Convolutional Network encoder based on Kolmogorov-Arnold Networks to capture the nonlinear dependencies between each modality and its associated spatial structure, thereby producing expressive, modality-specific embeddings. To align these representations, we introduce a spot-feature-pair contrastive learning strategy that explicitly optimizes the correspondence across modalities at each spot. Furthermore, we design a dynamic expert routing mechanism that adaptively selects informative modalities for each spot while suppressing noisy or low-quality inputs. Experiments on real-world spatial omics datasets demonstrate that GROVER outperforms state-of-the-art baselines, providing a robust and reliable solution for multimodal integration.
Gradient Short-Circuit: Efficient Out-of-Distribution Detection via Feature Intervention
Jul 02, 2025Out-of-Distribution (OOD) detection is critical for safely deploying deep models in open-world environments, where inputs may lie outside the training distribution. During inference on a model trained exclusively with In-Distribution (ID) data, we observe a salient gradient phenomenon: around an ID sample, the local gradient directions for "enhancing" that sample's predicted class remain relatively consistent, whereas OOD samples--unseen in training--exhibit disorganized or conflicting gradient directions in the same neighborhood. Motivated by this observation, we propose an inference-stage technique to short-circuit those feature coordinates that spurious gradients exploit to inflate OOD confidence, while leaving ID classification largely intact. To circumvent the expense of recomputing the logits after this gradient short-circuit, we further introduce a local first-order approximation that accurately captures the post-modification outputs without a second forward pass. Experiments on standard OOD benchmarks show our approach yields substantial improvements. Moreover, the method is lightweight and requires minimal changes to the standard inference pipeline, offering a practical path toward robust OOD detection in real-world applications.
Train with Perturbation, Infer after Merging: A Two-Stage Framework for Continual Learning
May 29, 2025Continual Learning (CL) aims to enable models to continuously acquire new knowledge from a sequence of tasks with avoiding the forgetting of learned information. However, existing CL methods only rely on the parameters of the most recent task for inference, which makes them susceptible to catastrophic forgetting. Inspired by the recent success of model merging techniques, we propose \textbf{Perturb-and-Merge (P\&M)}, a novel continual learning framework that integrates model merging into the CL paradigm to mitigate forgetting. Specifically, after training on each task, P\&M constructs a new model by forming a convex combination of the previous model and the newly trained task-specific model. Through theoretical analysis, we minimize the total loss increase across all tasks and derive an analytical solution for the optimal merging coefficient. To further improve the performance of the merged model, we observe that the degradation introduced during merging can be alleviated by a regularization term composed of the task vector and the Hessian matrix of the loss function. Interestingly, we show that this term can be efficiently approximated using second-order symmetric finite differences, and a stochastic perturbation strategy along the task vector direction is accordingly devised which incurs no additional forward or backward passes while providing an effective approximation of the regularization term. Finally, we combine P\&M with LoRA, a parameter-efficient fine-tuning method, to reduce memory overhead. Our proposed approach achieves state-of-the-art performance on several continual learning benchmark datasets.
SplitLoRA: Balancing Stability and Plasticity in Continual Learning Through Gradient Space Splitting
May 29, 2025Continual Learning requires a model to learn multiple tasks in sequence while maintaining both stability:preserving knowledge from previously learned tasks, and plasticity:effectively learning new tasks. Gradient projection has emerged as an effective and popular paradigm in CL, where it partitions the gradient space of previously learned tasks into two orthogonal subspaces: a primary subspace and a minor subspace. New tasks are learned effectively within the minor subspace, thereby reducing interference with previously acquired knowledge. However, existing Gradient Projection methods struggle to achieve an optimal balance between plasticity and stability, as it is hard to appropriately partition the gradient space. In this work, we consider a continual learning paradigm based on Low-Rank Adaptation, which has gained considerable attention due to its efficiency and wide applicability, and propose a novel approach for continual learning, called SplitLoRA. We first provide a theoretical analysis of how subspace partitioning affects model stability and plasticity. Informed by this analysis, we then introduce an effective method that derives the optimal partition of the gradient space for previously learned tasks. This approach effectively balances stability and plasticity in continual learning. Experimental results on multiple datasets demonstrate that the proposed method achieves state-of-the-art performance.
GCAL: Adapting Graph Models to Evolving Domain Shifts
May 22, 2025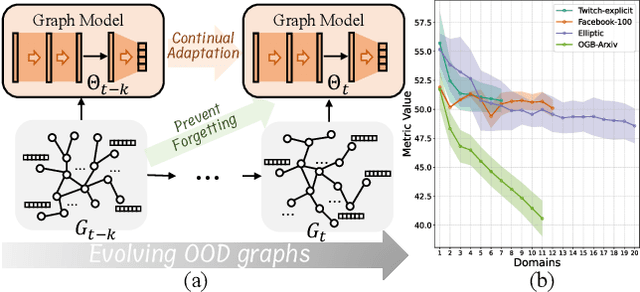
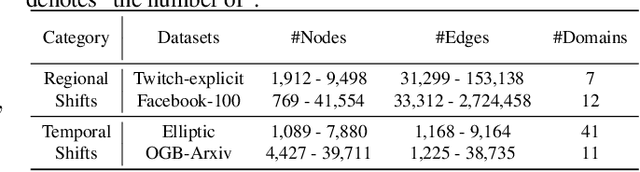
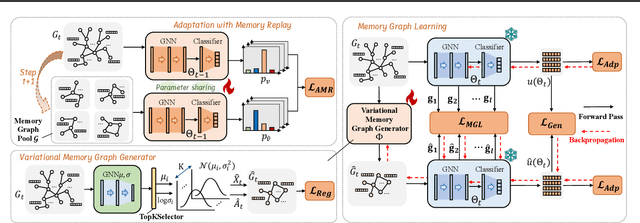
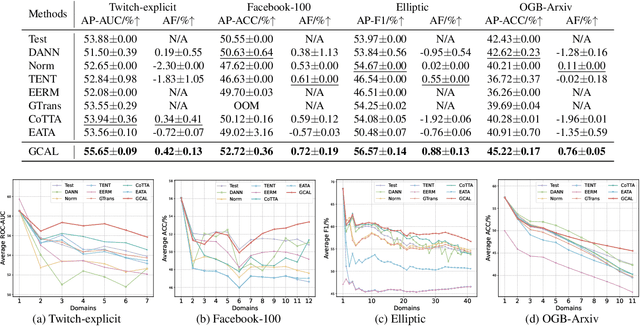
This paper addresses the challenge of graph domain adaptation on evolving, multiple out-of-distribution (OOD) graphs. Conventional graph domain adaptation methods are confined to single-step adaptation, making them ineffective in handling continuous domain shifts and prone to catastrophic forgetting. This paper introduces the Graph Continual Adaptive Learning (GCAL) method, designed to enhance model sustainability and adaptability across various graph domains. GCAL employs a bilevel optimization strategy. The "adapt" phase uses an information maximization approach to fine-tune the model with new graph domains while re-adapting past memories to mitigate forgetting. Concurrently, the "generate memory" phase, guided by a theoretical lower bound derived from information bottleneck theory, involves a variational memory graph generation module to condense original graphs into memories. Extensive experimental evaluations demonstrate that GCAL substantially outperforms existing methods in terms of adaptability and knowledge retention.
SpectralGap: Graph-Level Out-of-Distribution Detection via Laplacian Eigenvalue Gaps
May 21, 2025The task of graph-level out-of-distribution (OOD) detection is crucial for deploying graph neural networks in real-world settings. In this paper, we observe a significant difference in the relationship between the largest and second-largest eigenvalues of the Laplacian matrix for in-distribution (ID) and OOD graph samples: \textit{OOD samples often exhibit anomalous spectral gaps (the difference between the largest and second-largest eigenvalues)}. This observation motivates us to propose SpecGap, an effective post-hoc approach for OOD detection on graphs. SpecGap adjusts features by subtracting the component associated with the second-largest eigenvalue, scaled by the spectral gap, from the high-level features (i.e., $\mathbf{X}-\left(\lambda_n-\lambda_{n-1}\right) \mathbf{u}_{n-1} \mathbf{v}_{n-1}^T$). SpecGap achieves state-of-the-art performance across multiple benchmark datasets. We present extensive ablation studies and comprehensive theoretical analyses to support our empirical results. As a parameter-free post-hoc method, SpecGap can be easily integrated into existing graph neural network models without requiring any additional training or model modification.